Из выражения видно, что частоту вращения ротора можно регулировать изменением любой из трех величин, определяющих частоту вращения ротора: изменением частоты тока сети числа пар полюсов, и скольжения .
Регулирование частоты асинхронных двигателей изменением частоты тока сети сложно, так как для этого необходим какой-либо регулируемый преобразователь частоты или генератор. Этот способ не имел широкого использования, но сейчас - достаточно широко.
Дальнейшее преимущество заключается в том, что акустический шум, являющийся серьезной проблемой в оборудовании для кондиционирования воздуха, значительно сокращается. Потеря стабильности может возникнуть в результате такого подтопления с некоторыми стратегиями управления.
Высокопроизводительная работа электродвигателей переменного тока может быть достигнута за счет использования векторного управления потоком. Подробное объяснение выходит за рамки этой книги, но поскольку этот предмет подвержен значительным искажениям, может быть полезно несколько пояснений.
Изменение числа полюсов машины возможно либо выполнением на статоре нескольких (обычно двух) обмоток с различным числом полюсов, либо выполнением одной обмотки, допускающей переключение на различное число полюсов.
На статоре может быть помещено две обмотки, каждая из которых допускает переключение на различное число полюсов. Фаза обмотки статора состоит из двух последовательно соединенных катушек  и
и  . При соединении проводника с проводником , ток при включении обмотки в сеть в какой-либо момент протекает так, как показано на рисунке 33.1, а.
. При соединении проводника с проводником , ток при включении обмотки в сеть в какой-либо момент протекает так, как показано на рисунке 33.1, а.
Целью управления вектором потока является развязка потока, создающего поток, от тока, создающего крутящий момент, что дает структуру управления, эквивалентную структуре управления двигателем постоянного тока, показанной на фиг. 3. В отличие от контроллера двигателя постоянного тока невозможно измерить непосредственно потоки генерирования потока и вращающего момента и в управлении вектором потока, эти величины должны быть рассчитаны на основе измеренных токов двигателя, известных приложенных напряжений и параметров двигателя.
Если измеряется положение ротора, как это имеет место в векторных системах потока с замкнутым контуром, то фаза. Угол может быть рассчитан очень точно, и отличное управление потоком и крутящим моментом возможно на частотах, включая 0 Гц. К основным показателям эффективности относятся динамика, при которой производительность двигателей постоянного тока легко превышается, и линейность крутящего момента, которую можно контролировать в пределах 2% по всему рабочему диапазону при работе двигателя и торможения.
На статоре получается четыре полюса ( ). При переключении второй катушки (рисунок 33.1,б) изменяется направление тока в этой катушке и
). При переключении второй катушки (рисунок 33.1,б) изменяется направление тока в этой катушке и
а) 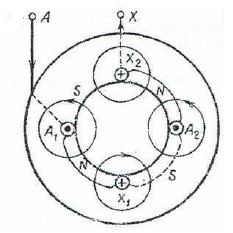 | б) 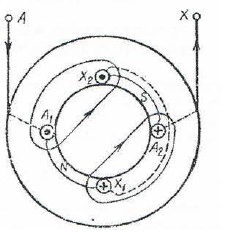 |
Рисунок 33.1 Схема переключения на различное число полюсов одной фазы обмотки статора
В системах управления с разомкнутым контуром, где нет скорости вращения ротора или измерения положения, качество системы управления критически зависит от характеристик оценки фазового угла. Современные промышленные системы должны сбалансировать производительность с надежностью в работе и надежностью, когда стандартный контроллер применяется к различным промышленным моторам.
Двигатель постоянного тока. Двигатели, управление двигателем и приводы. Измерения и контрольно-измерительные приборы: примечания по установке. Двигатели и генераторы: состояние ротора. Трансформаторы: распределительные трансформаторы. Электрические основы: закон Ома.
число полюсов окажется равным двум (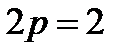 ). При изменении числа полюсов статора меняются частоты вращения поля статора и ротора. Заводы выпускают двух-, трех- и четырехскоростные асинхронные двигатели.
). При изменении числа полюсов статора меняются частоты вращения поля статора и ротора. Заводы выпускают двух-, трех- и четырехскоростные асинхронные двигатели.
Такой способ регулирования частоты вращения является экономичным, но имеет тот недостаток, что регулирование частоты получается ступенчатым и регулирование частоты изменением числа полюсов возможно только для двигателей с короткозамкнутым ротором.
Реактивное сопротивление утечки зависит от тока питания. Намагничивающее реактивное сопротивление зависит от потока воздушного зазора. Ответ: Объяснение: Поток утечки зависит от тока нагрузки, а реактивное сопротивление намагничивания зависит от потока воздушного зазора.
Сопротивление ротора зависит от скорости. Статор 3-фазного шестиполюсного асинхронного электродвигателя статора подключается к источнику питания 50 Гц, а его ротор подается от источника питания 20 Гц. Для 3-фазного 4-полюсного асинхронного двигателя имеют открытые замкнутые кольца скольжения. Частота на кольцах скольжения составляет 75 Гц.
В двигателях с фазным ротором число полюсов статора всегда должно быть равно числу полюсов ротора, и при изменении числа полюсов на статоре надо было бы в той же мере изменить число полюсов на роторе, что очень сложно в конструктивном отношении. Более сложное выполнение обмотки статора значительно повышает стоимость и габариты многоскоростных двигателей.
Ответ: Объяснение: Поскольку сопротивление было изменено, поскольку алюминий заменил медь, это не повлияет на максимальный крутящий момент. Ответ: Объяснение: Увеличение сопротивления, поэтому стартовый крутящий момент увеличивается. Центральный амперметр, подключенный к концевой цепи ротора 6-полюсного асинхронного двигателя частотой 50 Гц, совершает 45 полных колебаний за минуту.
Ответ: Объяснение: Эквивалентная схема может помочь дать полную характеристику электрической машины. Ответ: Объяснение: Это правда, потому что, поскольку один из фаз отсутствует, это приведет к снижению скорости, предполагая, что машина обеспечивает номинальную нагрузку.
Включение в цепь ротора регулировочного реостата и изменение напряжения сети изменяют скольжение и момент, развиваемый двигателем, который пропорционален квадрату напряжения. Изменение вращающего момента вызовет изменение частоты.
Предположим, что при напряжении сети рабочий процесс двигателя соответствовал точке (рисунок 33.2, а), в которой развиваемый двигателем момент равен тормозному моменту на валу.
Ответ: Объяснение: Он продолжает работать со сниженной скоростью, но с увеличенным током. Ответ: Объяснение: В целом во время работы коэффициент мощности улучшается по мере уменьшения реактивного сопротивления и уменьшения коэффициента мощности. Ответ: Объяснение: Для нижнего скольжения крутящий момент будет увеличиваться пропорционально скольжению, как проверено характеристикой крутящего момента.
Как 3-фазный асинхронный двигатель, так как загрузка увеличивается от нагрузки до полной нагрузки. Ответ: Объяснение: По мере увеличения нагрузки увеличивается поток воздушного зазора. Ответ: Объяснение: Это потому, что эффективное значение сопротивления намного больше, чем реактивное сопротивление, и поэтому крутящий момент является линейным в этой области.
а) 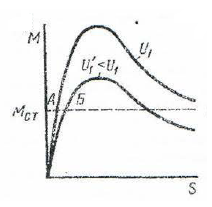 | б)  |
Рисунок 33.2 – Регулирование частоты вращения измерением скольжения:
а - при изменении напряжения сети;
б – при изменении сопротивления в цепи ротора
Если уменьшить напряжение сети до величины  , то кривая момента пройдет ниже, равновесие моментов нарушится и частота уменьшится, то есть новый установившийся режим будет в точке при большем значении скольжения. Этот способ регулирования экономичен но не эффективен, так как дает возможность менять частоту лишь в малых пределах до 10 - 15%. При значительном снижении напряжения врашаюший момент резко уменьшается и двигатель не может устойчиво работать.
, то кривая момента пройдет ниже, равновесие моментов нарушится и частота уменьшится, то есть новый установившийся режим будет в точке при большем значении скольжения. Этот способ регулирования экономичен но не эффективен, так как дает возможность менять частоту лишь в малых пределах до 10 - 15%. При значительном снижении напряжения врашаюший момент резко уменьшается и двигатель не может устойчиво работать.
Регулировочный реостат включают в цепь обмотки фазного ротора подобно пусковому реостату, но в отличие от пускового его рассчитывают на длительное прохождение тока.
Положим, что без регулировочного реостата двигатель работает при частоте, ссоответствующей точке (рисунок 33.2, б). При включении регулировочного реостата ток в роторе уменьшится и уменьшит вращающий момент двигателя и частоту вращения или увеличит скольжение.
При увеличении скольжения повышаются э.д.с. и ток в роторе. Изменение частоты вращения или скольжения будет происходить до восстановления равновесия моментов, то есть пока ток в роторе не примет своего начального значения. При увеличении активного сопротивления в роторе максимальный момент, не изменяясь по величине, сместится в
область больших скольжений и равновесие моментов, то есть новый установившийся режим работы машины, будет в точке , соответствующей меньшей частоте вращения. Этот способ регулирования частоты вращения может быть использован только в двигателях с фазным ротором и несмотря на то, что он неэкономичен (в регулировочном реостате происходит значительная потеря энергии), имеет широкое применение.
Частота вращения асинхронного двигателя зависит от напряжения питания. Можно показать, что вращающий момент М пропорционален квадрату напряжения питания. Поэтому даже небольшие колебания напряжения питания приводят к заметному изменению вращающего момента и частоты вращения двигателя.
Соединение катушечных групп при а - последовательное. б - параллельное.| Соединение катушечных групп при. Частота вращения асинхронных двигателей может достигать 500 тыс. об / мин. При высоких частотах вращения шихтованный ротор из-за низкой механической прочности не применяют. В таких двигателях ротор выполняют массивным. При этом ротор представляет собой ферромагнитный цилиндр. В массивном роторе совмещают магнитопровод и обмотку.
Изменение производительности прядильной машины типа. Частота вращения асинхронных двигателей меняется в зависимости от подведенного напряжения. В ряде случаев при использовании асинхронных двигателей, например в установках поточных линий, изменения напряжения в допустимых пределах (5 - т - 10 %) могут существенно повлиять на производительность технологического оборудования. Это положение подтверждают исследования, проведенные в различных отраслях промышленности.
Частота вращения асинхронных двигателей с корот-козамкнутым ротором, а также синхронных двигателей, как известно, не регулируется. Поэтому при использовании их в качестве привода прибегают к двум первым способам регулирования производительности или к установке муфт скольжения. В случае, если необходимо расширить диапазон регулирования производительности (например, в тягодутьевых машинах центробежного типа), выбирают двухскоростные асинхронные двигатели. Переключение обмоток статора двухскоростного двигателя с различным числом пар полюсов позволяет получить две ступени частоты вращения. Двухскоростные двигатели требуют двух присоединений к РУ с.
Частота вращения асинхронного двигателя никогда не может достигнуть синхронной скорости (поэтому и название его асинхронный), так как в этом случае магнитный поток статора был бы неподвижен относительно ротора и вращающий момент был бы равен нулю.
Частоту вращения асинхронных двигателей с фазовыми роторами регулируют изменением сопротивления ротора двигателя, для чего включают или выключают пусковые резисторы. Включение в цепь ротора пускового резистора уменьшает частоту вращения ротора, выключение резистора увеличивает ее. Шунтирование (выведение из цепи) части резистора производят с помощью контроллера.
Регулирование частоты вращения асинхронных двигателей с фазным ротором может быть осуществлено с помощью сопротивлений в цепи ротора по схеме на рис. 3.7, а. Этот способ имеет те же преимущества и недостатки, что и способ регулирования частоты вращения двигателя постоянного тока включением сопротивления в цепь якоря.
Регулирование частоты вращения асинхронного двигателя с фазным ротором путем включения реостата в цепь ротора сопровождается потерей энергии в реостате, что может существенно снизить энергетические показатели электропривода. Однако имеется возможность регулировать частоту вращения таких двигателей без потерь энергии в реостате. Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю, который сообщает дополнительную механическую энергию валу основного асинхронного двигателя. Сочетание асинхронного двигателя с преобразовательной установкой или с преобразовательной установкой и вспомогательным двигателем называют асинхронным каскадом. В настоящее время в асинхронных каскадах применяют главным образом полупроводниковые преобразователи, поэтому их часто называют вентильными каскадами.
Пуск двигателя переключением статора со звезды на треугольник.| Схема асинхронного двигателя с кольцами. Регулирование частоты вращения асинхронного двигателя с помощью реостата в цепи ротора сопряжено с большими потерями энергии в реостате. Такое регулирование может осуществляться только в двигателе с кольцами.
Регулирование частоты вращения асинхронного двигателя с фазным ротором путем включения реостата в цепь ротора сопровождается потерей энергии в реостате, что может существенно снизить энергетические показатели электропривода. Однако имеется возможность регулировать частоту вращения таких двигателей без потерь энергии в реостате. Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю, который сообщает дополнительную механическую энергию валу основного асинхронного двигателя. Сочетание асинхронного двигателя с преобразовательной установкой или же с преобразовательной установкой и вспомогательным двигателем называют асинхронным каскадом. В настоящее время в асинхронных каскадах применяют главным образом полупроводниковые преобразователи, поэтому их часто называют вентильными каскадами.
Схема вентильного асинхронного каскада.
Регулирование частоты вращения асинхронного двигателя с фазным ротором путем включения реостата в цепь ротора сопровождается потерей энергии в реостате, что может существенно снизить энергетические показатели электропривода. Однако имеется возможность регулировать частоту вращения таких двигателей без потерь энергии в реостате. Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения) посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю, который сообщает дополнительную механическую энергию валу основного асинхронного двигателя.
Регулирование частоты вращения асинхронных двигателей с фазным ротором может быть осуществлено с помощью резисторов в цепи ротора по схеме рис. 3.7, а. Этот способ имеет те же преимущества и недостатки, что и способ регулирования частоты вращения двигателя постоянного тока включением резистора в цепь якоря.
Регулирование частоты вращения асинхронных двигателей путем переключения числа пар полюсов производится без потерь мощности.
Регулирование частоты вращения асинхронных двигателей с контактными кольцами осуществляется введением в цепь ротора двигателя активного сопротивления. Что касается изменения частоты вращения двигателей постоянного тока, то оно может быть достигнуто, в зависимости от требуемых пределов регулирования исполнительного механизма, изменением подводимого напряжения, изменением магнитного потока двигателя, а также путем использования двигателя в системе генератор - двигатель.
Регулирование частоты вращения асинхронных двигателей резисторами в цепи ротора дает малоустойчивые частоты вращения особенно при малых статических моментах и когда требуются низкие частоты вращения.
Регулирование частоты вращения асинхронных двигателей несимметричными сопротивлениями ступеней резистора в роторе является как описано в § 3 - 5, неудовлетворительным.
Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов осуществляется лишь ступенями.
Схема переключения обмотки статора на разное число полюсов. Регулирование частоты вращения асинхронных двигателей изменением частоты тока сети сложно, так как необходим какой-либо регулируемый преобразователь частоты или генератор. Поэтому такой способ не имеет широкого применения.
Определить частоту вращения асинхронного двигателя при развиваемом моменте М 1 5 Мн, если двигатель имеет следующие параметры: отношение критического момента к номинальному МК / М 2; критическое скольжение sK 0 14; ni 1500 об / мин.
Определить частоту вращения асинхронного двигателя при развиваемом моменте Afl5 М, если двигатель имеет следующие параметры: отношение критического момента к номинальному МК / МН 2; критическое скольжение sK 0 14; i 1500 об / мин.
Регулируют частоту вращения асинхронных двигателей с фазовыми роторами изменением сопротивления цепи ротора, для чего с помощью контроллера вводят или выводят из цепи часть сопротивлений пускового реостата. При вводе или шунтировании сопротивлений соответственно уменьшается или увеличивается частота вращения вигателя.
Глубокое регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения связано с выделением в цепи ротора значительной электрической мощности скольжения, которая теряется на нагрев двигателя и резисторов. Можно использовать мощность скольжения, если к контактным кольцам ротора через выпрямитель присоединить двигатель постоянного тока, сочлененный с валом асинхронного двигателя.
Плавное регулирование частоты вращения асинхронного двигателя с короткозамкнутым ротором в узких пределах возможно путем изменения напряжения на его входе. Однако для относительно малого уменьшения частоты вращения требуется значительное снижение напряжения, что резко снижает перегрузочную способность двигателя.
При регулировании частоты вращения асинхронного двигателя были получены следующие частоты вращения: 1500, 1000, 750 об / мин.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором обычно служат метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного поля, при котором частота вращения магнитного поля изменяется скачком.
С изменением частоты вращения асинхронного двигателя изменяется момент сопротивления приводного механизма. Это изменение определяется механической характеристикой приводного механизма.
Схема регулирования частоты вращения с тиристорным регулятором напряжения.| Реверсивная схема регулирования частоты вращения асинхронных двигателей.| Электромеханический каскад.| Электрический каскад. Проблема регулирования частоты вращения асинхронных двигателей оригинально решена в двигателях-усилителях, в которых магнитные усилители выполнены на спинке статора с намоткой обмоток магнитного усилителя в те же пазы, что и двигатель.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором применяется метод реостатного регулирования, представляющий собой плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором обычно служат метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного ноля, при котором частота вращения магнитного ноля изменяется скачком.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором применяется метод реостатного регулирования, представляющий собой плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток.
Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора.
Для регулирования частоты вращения асинхронных двигателей с коротко-замкнутым ротором обычно используются метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного поля, при котором частота вращения магнитного поля изменяется скачком.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором используется метод реостатного регулирования, представляющий собой плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором обычно служат метод частотного регулирования, представляющий собой плавное регулирование частоты вращения мапштногч) поля путем регулирования частоты тока в обмотках статора, и метод изменения числа нар полюсов вращающегося магнитного поля, при котором частота вращения магнитного ноля изменяется скачком.
Для управления частотой вращения асинхронных двигателей необходимо изменять частоту переменного тока, обтекающего его обмотки. И в этом случае используют тиристоры, с помощью которых формируются прямоугольные биполярные импульсы различной длительности. Достоинства тиристоров: практически безынер-ционность, малое внутреннее сопротивление в открытом состоянии. Последнее означает, что действующее на них падение напряжения мало и оно на порядок меньше, чем для таких газовых приборов, как тиратроны.
Этот способ регулирования частоты вращения асинхронного двигателя экономичен, но недостатком его является ступенчатое изменение частоты. Кроме того, стоимость такого двигателя значительно возрастает вследствие усложнения обмотки статора и увеличения габаритов машины.
Частотный способ регулирования частоты вращения асинхронных двигателей является наиболее перспективным, так как он принципиально обеспечивает глубокое, плавное и экономичное изменение частоты вращения машины. Однако для его реализации требуется специальный источник питания с регулируемой частотой и напряжением. Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов осуществляется наиболее просто, но производится лишь ступенями. Регулирование частоты вращения при помощи регулировочного реостата, включенного в цепь обмотки ротора, наиболее просто, но неэкономично из-за увеличения электрических потерь в роторной цепи.
Смысл частотного регулирования частоты вращения асинхронных двигателей заключается в регулировании частоты вращения поля статора регулированием частоты питающего напряжения. Такие системы рассмотрены далее (см. стр.
Схемы подключения асинхронного двигателя к сети при различном направлении вращения ротора. а - ход вперед, б - ход назад. Какими способами регулируют частоту вращения асинхронных двигателей.
Более экономично регулировать частоту вращения асинхронных двигателей изменением частоты вращения поля статора. Последний способ не требует каких-либо дополнительных устройств и поэтому широко применяется в практике, несмотря на то, что частота вращения двигателя изменяется только ступенями.
Приншшиальная схема асинхронного исполнительного двигателя (а и векторные диаграммы напряжения при амплитудном (б и фазовом (в управлениях. При всех методах управления частота вращения асинхронного двигателя изменяется за счет образования несимметричного эллиптического магнитного поля, которое можно представить в виде двух круговых вращающихся полей прямой и обратной последовательностей (см. гл. Изменение напряжения на обмотке управления по величине или фазе приводит к изменению соотношений между амплитудами потоков прямой и обратной последовательностей. В связи с этим изменяется вид механической характеристики, а следовательно, и частота вращения двигателя. Однако при этом возрастают и потери мощности в двигателе.
При всех методах управления частота вращения асинхронного двигателя изменяется за счет образования несимметричного эллиптического магнитного поля, которое можно представить в виде двух круговых вращающихся полей прямой и обратной последовательностей (см. гл. Изменение напряжения на обмотке управления по величине или фазе приводит к изменению соотношений между амплитудами потоков прямой и обратной последовательностей. В связи с этим меняется вид механической характеристики, а следовательно, и частота вращения двигателя.
Схемы электромеханического (а и электрического (б каскадов асинхронного двигателя с машиной постоянного тока. Реализация рассмотренного способа регулирования частоты вращения асинхронного двигателя с фазным ротором осуществляется в каскадных соединениях с машинами постоянного тока.
Какой из способов регулирования частоты вращения асинхронных двигателей и двигателей постоянного тока с параллельным возбуждением практически не пригоден (не позволяет существенно изменить частоту вращения) при отсутствии нагрузки на валу двигателя.
Схема частотного регулирования частоты вращения асинхронных двигателей. Наиболее перспективным способом регулирования частоты вращения асинхронных двигателей является ча-стотйый.

